|
RSB
0.7.0
|
|
RSB
0.7.0
|
Factory for RSB user-level domain objects for communication patterns. More...
#include <Factory.h>
Public Member Functions | |
| virtual | ~Factory () |
| template<class DataType > | |
| Informer< DataType >::Ptr | createInformer (const Scope &scope, const ParticipantConfig &config=Factory::getInstance().getDefaultParticipantConfig(), const std::string &dataType=detail::TypeName< DataType >()()) |
| Creates and returns a new Informer that publishes Event s under the Scope scope. | |
| InformerBasePtr | createInformerBase (const Scope &scope, const std::string &dataType="", const ParticipantConfig &config=Factory::getInstance().getDefaultParticipantConfig()) |
| Creates and returns a new Informer that publishes Event s under the Scope scope. | |
| ListenerPtr | createListener (const Scope &scope, const ParticipantConfig &config=Factory::getInstance().getDefaultParticipantConfig()) |
| Creates a new listener for the specified scope. | |
| ReaderPtr | createReader (const Scope &scope, const ParticipantConfig &config=Factory::getInstance().getDefaultParticipantConfig()) |
| Creates a new Reader object for the specified scope. | |
| ServicePtr | createService (const Scope &scope) |
| Creates a Service instance operating on the given scope. | |
| patterns::ServerPtr | createServer (const Scope &scope, const ParticipantConfig &listenerConfig=Factory::getInstance().getDefaultParticipantConfig(), const ParticipantConfig &informerConfig=Factory::getInstance().getDefaultParticipantConfig()) |
| Creates a Server object that exposes methods under the scope scope. | |
| patterns::RemoteServerPtr | createRemoteServer (const Scope &scope, const ParticipantConfig &listenerConfig=Factory::getInstance().getDefaultParticipantConfig(), const ParticipantConfig &informerConfig=Factory::getInstance().getDefaultParticipantConfig()) |
| Creates a RemoteServer object for the server at scope scope. | |
| ParticipantConfig | getDefaultParticipantConfig () const |
| Returns the default configuration for new participants. | |
| void | setDefaultParticipantConfig (const ParticipantConfig &config) |
| Sets the default config for participants that will be used for every new participant that is created after this call. | |
Private Member Functions | |
| transport::OutFactory & | getOutFactoryInstance () |
| This function is only required to have the same factory instance on windows because there the Singleton template is instantiated once per compilation unit. | |
| Factory () | |
| Singleton constructor. | |
| std::vector < transport::OutConnectorPtr > | createOutConnectors (const ParticipantConfig &config) |
| std::vector < transport::InPullConnectorPtr > | createInPullConnectors (const ParticipantConfig &config) |
| std::vector < transport::InPushConnectorPtr > | createInPushConnectors (const ParticipantConfig &config) |
| void | configureLogging () |
Private Attributes | |
| rsc::logging::LoggerPtr | logger |
| ParticipantConfig | defaultConfig |
| Always acquire configMutex before reading or writing the config. | |
| boost::recursive_mutex | configMutex |
Friends | |
| class | rsc::patterns::Singleton< Factory > |
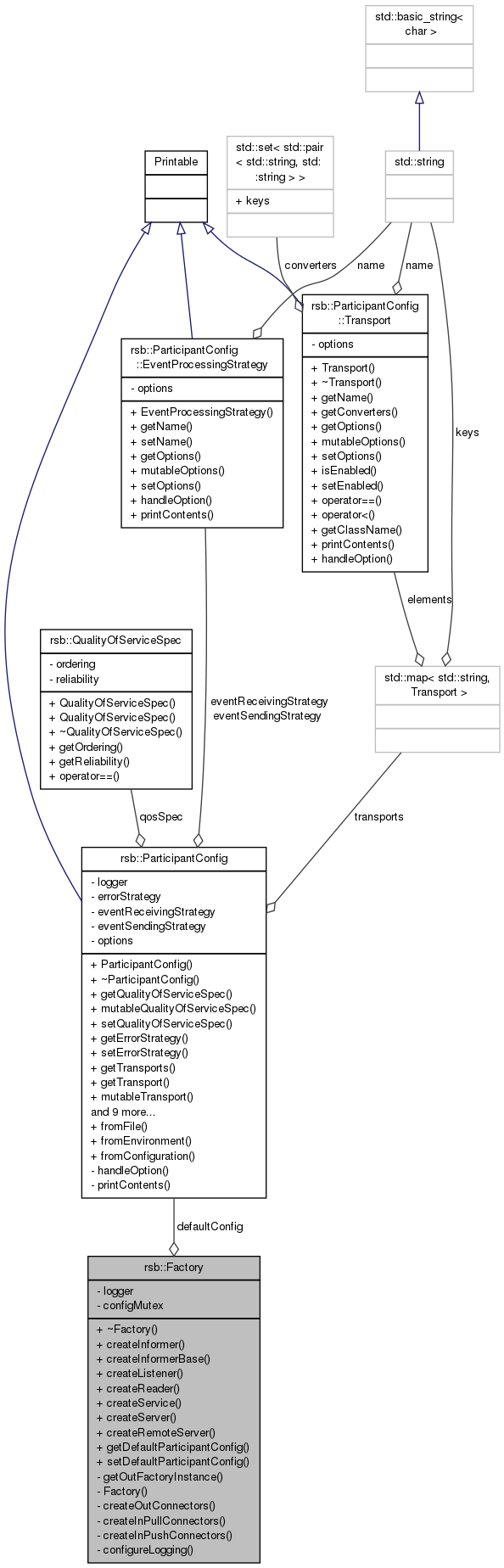
Factory for RSB user-level domain objects for communication patterns.
|
virtual |
Definition at line 145 of file Factory.cpp.
|
private |
Singleton constructor.
Definition at line 78 of file Factory.cpp.
References rsb::ParticipantConfig::addTransport(), configureLogging(), defaultConfig, rsb::ParticipantConfig::fromConfiguration(), rsb::transport::ConnectorFactory< Interface >::getConnectorInfos(), rsb::transport::getInPullFactory(), rsb::transport::getInPushFactory(), rsb::transport::getOutFactory(), rsb::ParticipantConfig::getTransports(), logger, rsb::ParticipantConfig::mutableTransport(), rsb::converter::registerDefaultConverters(), rsb::eventprocessing::registerDefaultEventProcessingStrategies(), rsb::transport::registerDefaultTransports(), and rsb::ParticipantConfig::Transport::setEnabled().

|
private |
Definition at line 148 of file Factory.cpp.
References logger.
Referenced by Factory().

|
inline |
Creates and returns a new Informer that publishes Event s under the Scope scope.
| DataType | the C++ data type this informer publishes |
| scope | the scope of the informer |
| config | the configuration for the informer to use, defaults to the general config held in this factory. |
| dataType | A string representation of the type of data sent via the new Informer |
| RSBError | If the requested informer cannot be created. |
| InformerBasePtr rsb::Factory::createInformerBase | ( | const Scope & | scope, |
| const std::string & | dataType = "", |
||
| const ParticipantConfig & | config = Factory::getInstance().getDefaultParticipantConfig() |
||
| ) |
Creates and returns a new Informer that publishes Event s under the Scope scope.
| scope | the scope of the informer |
| dataType | A string representation of the type of data sent via the new Informer. |
| config | The configuration for the informer to use, defaults to the general config held in this factory. |
| RSBError | If the requested informer cannot be created. |
Definition at line 201 of file Factory.cpp.
References createOutConnectors().

|
private |
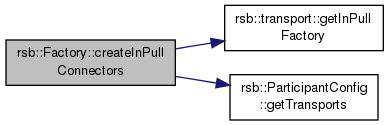
Definition at line 247 of file Factory.cpp.
References rsb::transport::getInPullFactory(), rsb::ParticipantConfig::getTransports(), and logger.
Referenced by createReader().

|
private |
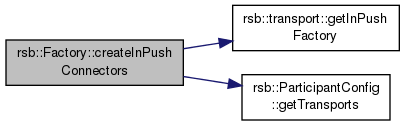
Definition at line 276 of file Factory.cpp.
References rsb::transport::getInPushFactory(), rsb::ParticipantConfig::getTransports(), and logger.
Referenced by createListener().

| ListenerPtr rsb::Factory::createListener | ( | const Scope & | scope, |
| const ParticipantConfig & | config = Factory::getInstance().getDefaultParticipantConfig() |
||
| ) |
Creates a new listener for the specified scope.
| scope | the scope of the new listener |
| config | the configuration for the LISTENER to use, defaults to the general config held in this factory.f |
Definition at line 208 of file Factory.cpp.
References createInPushConnectors().

|
private |
Definition at line 305 of file Factory.cpp.
References rsb::transport::getOutFactory(), rsb::ParticipantConfig::getTransports(), and logger.
Referenced by createInformerBase().


| ReaderPtr rsb::Factory::createReader | ( | const Scope & | scope, |
| const ParticipantConfig & | config = Factory::getInstance().getDefaultParticipantConfig() |
||
| ) |
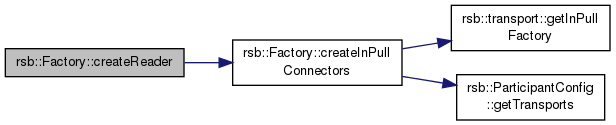
Creates a new Reader object for the specified scope.
Reader objects receive event via a pull-style interface by calls to Reader::read.
| scope | the scope of the new receiver |
| RSBError | when the requested connection cannot be established. |
Definition at line 213 of file Factory.cpp.
References createInPullConnectors().
| patterns::RemoteServerPtr rsb::Factory::createRemoteServer | ( | const Scope & | scope, |
| const ParticipantConfig & | listenerConfig = Factory::getInstance().getDefaultParticipantConfig(), |
||
| const ParticipantConfig & | informerConfig = Factory::getInstance().getDefaultParticipantConfig() |
||
| ) |
Creates a RemoteServer object for the server at scope scope.
| scope | The scope at which the remote server object exposes itself. |
| listenerConfig | configuration to use for all reply listeners |
| informerConfig | configuration to use for all request informers |
Definition at line 225 of file Factory.cpp.
| patterns::ServerPtr rsb::Factory::createServer | ( | const Scope & | scope, |
| const ParticipantConfig & | listenerConfig = Factory::getInstance().getDefaultParticipantConfig(), |
||
| const ParticipantConfig & | informerConfig = Factory::getInstance().getDefaultParticipantConfig() |
||
| ) |
Creates a Server object that exposes methods under the scope scope.
| scope | The scope under which the new server exposes its methods. |
| listenerConfig | configuration to use for all request listeners |
| informerConfig | configuration to use for all reply informers |
Definition at line 218 of file Factory.cpp.
| ServicePtr rsb::Factory::createService | ( | const Scope & | scope | ) |
Creates a Service instance operating on the given scope.
| scope | parent-scope of the new service |
Definition at line 242 of file Factory.cpp.
| ParticipantConfig rsb::Factory::getDefaultParticipantConfig | ( | ) | const |
Returns the default configuration for new participants.
Definition at line 232 of file Factory.cpp.
References configMutex, and defaultConfig.
|
private |
This function is only required to have the same factory instance on windows because there the Singleton template is instantiated once per compilation unit.
For the template-based createInformer method this will then be in the caller's compilation unit. :/
Definition at line 197 of file Factory.cpp.
| void rsb::Factory::setDefaultParticipantConfig | ( | const ParticipantConfig & | config | ) |
Sets the default config for participants that will be used for every new participant that is created after this call.
| config | new config |
Definition at line 237 of file Factory.cpp.
References configMutex, and defaultConfig.
|
mutableprivate |
Definition at line 216 of file Factory.h.
Referenced by getDefaultParticipantConfig(), and setDefaultParticipantConfig().
|
private |
Always acquire configMutex before reading or writing the config.
Definition at line 215 of file Factory.h.
Referenced by Factory(), getDefaultParticipantConfig(), and setDefaultParticipantConfig().
|
private |
Definition at line 210 of file Factory.h.
Referenced by configureLogging(), createInPullConnectors(), createInPushConnectors(), createOutConnectors(), and Factory().
 1.8.1.2
1.8.1.2 
